Produkt




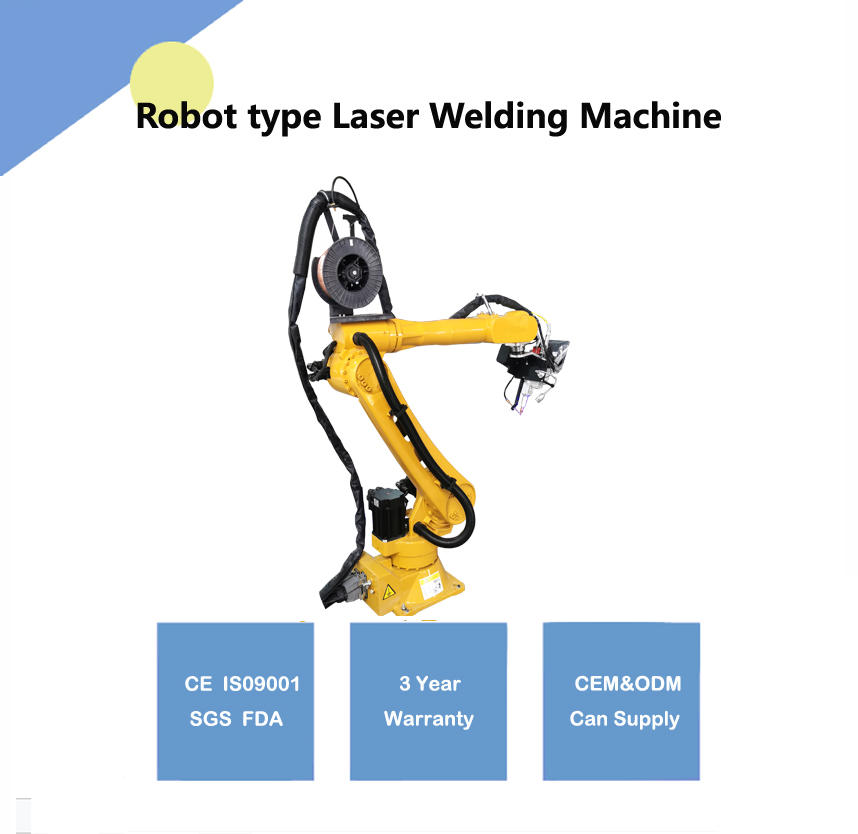
Robottype laserlasmasine
Produktwerjefte
Technyske parameter
| Seis-assige robot | Tuling | Kearnkomponinten | Laserboarne |
| Gebrûk | Lasmetaal | Maks. útfierkrêft | 2000W |
| Tapast materiaal | Metaal | CNC of net | Ja |
| Koelmodus | Wetterkoeling | Elektryske en pneumatyske systemen | Schneider |
| Golflingte | 1090Nm | Laserkrêft | 1000w/ 1500w/ 2000w |
| Gewicht (kg) | 600 kg | Sertifikaasje | Ce, Iso9001 |
| Kearnkomponinten | Fiberlaserboarne, glêstried, handgreep laserlaserkop | Wichtige ferkeappunten | Hege krektens |
| Funksje | Laserlassen fan metalen ûnderdielen | Fiberlengte | ≥10m |
| Tapasselike yndustryen | Hotels, Kleanwinkels, Boumaterialenwinkels | Kearnkomponinten | Laserboarne |
| Modus fan operaasje | Pulsearre | Tsjinst nei garânsje | Online stipe |
| Fokale puntdiameter | 50μm | Maksimale dekking | 1730mm |
| Fideo útgeande ynspeksje | Oanbean | Grafysk formaat stipe | Ai, Plt, Dxf, Dwg, Dxp |
| Plak fan oarsprong | Jinan, Shandong Province | Garânsjetiid | 3 jier |
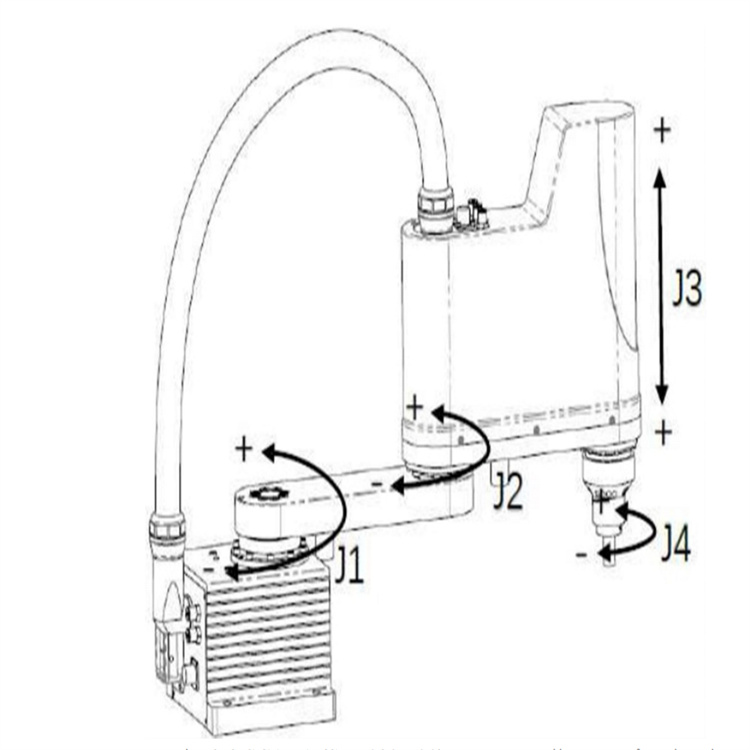
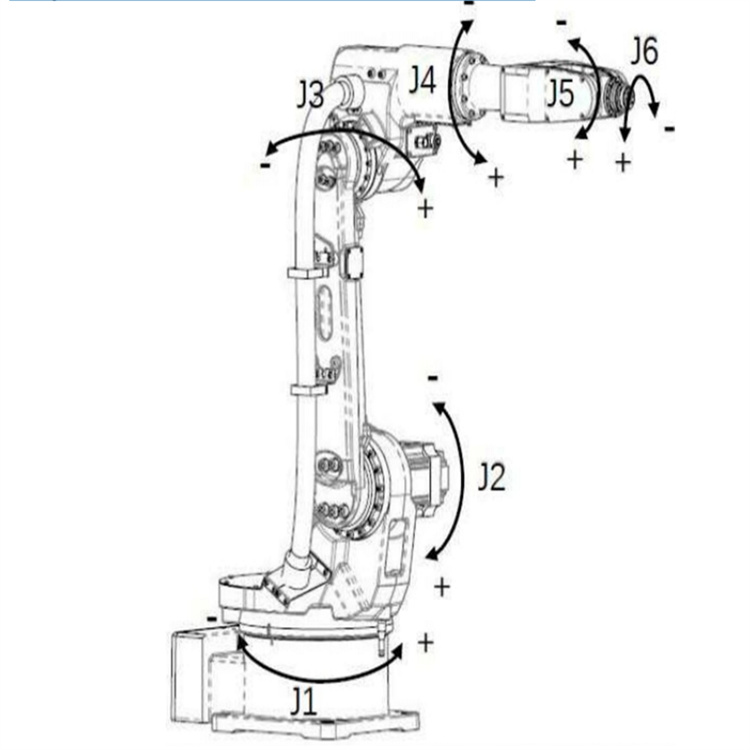
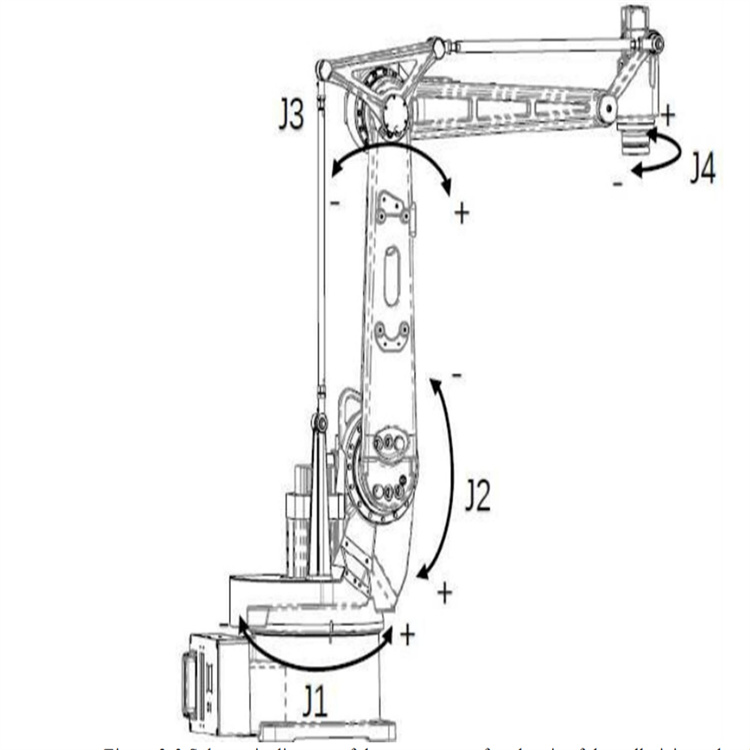
Robotarm
De robotas kin in rotearjende as in translaasjeas wêze, en de wurkwize fan 'e as wurdt bepaald troch de meganyske struktuer. De robotas is ferdield yn 'e bewegingsas fan it robotlichem en de eksterne as. De eksterne as is ferdield yn in skuiftafel en in posysjonearder. Behalven as oars oanjûn, ferwiist de robotas nei de bewegingsas fan it robotlichem.
Turing-robots wurde ferdield yn trije soarten yndustriële robots:
Yndustriële seis-assige robot: ynklusyf seis rotaasjeassen
SCARA: befettet trije rotaasjeassen en ien oersettingsas
Palletisearjende manipulator: ynklusyf fjouwer rotearjende assen De mienskiplike beweging fan 'e robot wurdt werjûn yn 'e ôfbylding.
Tapassing fan robotlasmasine
1. Masineproduksjefjild
Mei de yntinsivearring fan laswurk yn 'e masineproduksje-yndustry hat de lasoperaasje ynherint minne arbeidsomstannichheden en grutte waarmtestrieling, wat in tige gefaarlik berop is. Der binne ek in soad grutskalige apparatuer yn 'e masineproduksje, wat ek de swierrichheid fan lassen fergruttet. In lasrobot is in automatyske meganyske apparatuer dy't dwaande is mei laswurk, wat de arbeidsyntinsiteit fan arbeiders befrije en helpt it nivo fan automatisearring op it mêd fan masineproduksje te ferbetterjen.
2. Auto- en auto-ûnderdielen:
Yn 'e lêste jierren hat de auto-yndustry, om oan 'e behoeften fan it publyk te foldwaan, in ferskaat oan ûntwikkeling sjen litten. Tradisjoneel lassen kin net foldwaan oan 'e hege laseasken fan auto- en auto-ûnderdielenproduksje. De lasnaad is moai en stevich. Yn in protte moderne autoproduksjeworkshops binne lasrobot-assemblagelinen foarme.
3. Elektroanyske apparatuer:
It fjild fan elektroanyske apparatuer hat relatyf hege easken foar laskwaliteit. Mei de tanimmende fraach nei elektroanyske apparatuer yn 'e maatskippij stiet elektroanyske apparatuer ek foar swiere útdagings, wylst se rap ûntwikkelje. Lasrobots kinne de laskwaliteit stabilisearje en tagelyk de produksjeeffisjinsje garandearje. It krekte lassen fan 'e apparatuer is trije oant fjouwer kear heger as dat fan hânarbeid.
4. Loftfeart:
Yn 'e struktuer fan it fleantúch binne der hast 1.000 laskomponinten fan 'e romp, en hast 10.000 ûnderdielen binne belutsen. De measte wichtige draachkomponinten fan it fleantúch brûke laskomponinten. De romp fan it fleantúch stiet ûnder grutte druk tidens de flecht, sadat de easken foar lassen relatyf strang binne, en de lasrobot kin de lasparameters fleksibel ynstelle fia de automatyske lasnaadtrackingtechnology om de struktuer fan it fleantúch sekuer te lassen.
Underhâld fan masine
- Triedfeedmeganisme. Ynklusyf oft de triedfeedôfstân normaal is, oft de triedfeedlieding skansearre is, en oft der in abnormaal alarm is; Oft de gasstream normaal is; Oft it feiligensbeskermingssysteem fan 'e lasbrander normaal is. (It is ferbean om de lasbrander te sluten foar feiligensbeskermingswurk); Oft it wettersirkulaasjesysteem normaal wurket; Test TCP (it is oan te rieden om in testprogramma te kompilearjen en it nei elke shift út te fieren)
2. Wyklikse ynspeksje en ûnderhâld
1. Skrobje elke as fan 'e robot; Kontrolearje de krektens fan 'e TCP; Kontrolearje it oerbleaune oaljenivo. ;Kontrolearje oft de nulposysje fan elke as fan 'e robot akkuraat is; Meitsje it filter efter de wettertank fan 'e lasmasine skjin.; Meitsje it filter by de ynlaat fan 'e perslucht skjin; Meitsje de ûnreinheden by de nozzle fan 'e lasbrander skjin om ferstopping fan 'e wettersirkulaasje te foarkommen; Meitsje it triedoanfiermeganisme skjin, ynklusyf triedoanfierwiel, trieddrukwiel en triedgeleiderbuis; Kontrolearje oft de slangbundel en de triedgeleiderslang skansearre of brutsen binne. (It is oan te rieden om de heule slangbundel te ferwiderjen en skjin te meitsjen mei perslucht); Kontrolearje oft it feiligenssysteem fan 'e lasbrander normaal is en oft de eksterne needstopknop normaal is.